����˾")
�t��PID����ԭ��
���ڣ�2016-6-29 12:24:42 ���ߣ� ������
PID�DZ������e�֡��ֵĺ��Q��PID���Ƶ��y�c(di��n)���Ǿ��̣����ǿ������ą���(sh��)����������(sh��)�������P(gu��n)�I�����_�����������(sh��)���������x��PID���Ƶ�ԭ���������ˌ��t�ص��քӿ��Ɓ����⡣��x���IJ���Ҫ����Ĕ�(sh��)�W(xu��)֪�R��
1����������
�н�(j��ng)�(y��n)�IJ����ˆT�քӿ���늼ӟ�t�Ġt�أ����ԫ@�÷dz��õĿ���Ʒ�|(zh��)��PID�����c�˹����ƵĿ��Ʋ����кܶ����Ƶĵط���
�����B�����ˆT�����ñ������Ƶ�˼����քӿ���늼ӟ�t�Ġt�ء����O(sh��)�ß��ż�z�y�t�أ��Ô�(sh��)�փx���@ʾ�ض�ֵ���ڿ����^���У������ˆT���۾��xȡ�t�أ����c�t�ؽo��ֵ���^���õ��ضȵ��`��ֵ��Ȼ�����ֲ����λ�����{(di��o)��(ji��)�ӟ�������ʹ?f��n)t�ر����ڽo��ֵ������
�����ˆT֪���t�ط�(w��n)���ڽo��ֵ�r(sh��)�λ���Ĵ���λ�ã��҂������Q��λ��L����������(j��)��(d��ng)�r(sh��)�Ĝض��`��ֵ�{(di��o)�����Ƽӟ�������λ�����D(zhu��n)�ǡ��t��С�ڽo��ֵ�r(sh��)���`���������λ��L�Ļ��A(ch��)��형r(sh��)������λ�����D(zhu��n)�ǣ�������ӟ��������t�ش��ڽo��ֵ�r(sh��)���`���ؓ(f��)����λ��L�Ļ��A(ch��)�Ϸ��r(sh��)ᘜpС�λ�����D(zhu��n)�ǣ������D(zhu��n)���cλ��L�IJ�ֵ�c�`������ȡ��������Ʋ��Ծ��DZ������ƣ���PID������ݔ���еı��������c�`������ȡ�
�]�h(hu��n)�д��������N���ӵ����t���á������{(di��o)��(ji��)�λ���D(zhu��n)�Ǻ��ض��������µ��D(zhu��n)�nj���(y��ng)�ķ�(w��n)�B(t��i)ֵ�r(sh��)���^��ĕr(sh��)�g���t���������t���صĴ��ڣ��{(di��o)��(ji��)�λ���D(zhu��n)�Ǻ����R�Ͽ����{(di��o)��(ji��)��Ч��������]�h(hu��n)����ϵ�y(t��ng)�{(di��o)��(ji��)���y����Ҫԭ����ϵ�y(t��ng)�е����t���á�
�������Ƶı���ϵ��(sh��)���̫С�����{(di��o)��(ji��)����λ���D(zhu��n)���cλ��L�IJ�ֵ̫С���{(di��o)��(ji��)�����Ȳ���ʹϵ�y(t��ng)ݔ����׃���������{(di��o)��(ji��)����Ŀ��r(sh��)�g�^�L������ϵ��(sh��)����^���{(di��o)��(ji��)���λ���D(zhu��n)���cλ��L�IJ�ֵ�^���{(di��o)��(ji��)����̫��(qi��ng)��������{(di��o)��(ji��)�^�^������ʹ�ضȺ��ߺ��ͣ�������ʎ��
�������ϵ��(sh��)ʹϵ�y(t��ng)����(y��ng)�`�����{(di��o)��(ji��)�ٶȼӿ죬���ҿ��ԜpС��(w��n)�B(t��i)�`����DZ���ϵ��(sh��)�^���ʹ���{(di��o)��������ʎ�Δ�(sh��)���ӣ��{(di��o)��(ji��)�r(sh��)�g���L���ӑB(t��i)����׃�ģ�����ϵ��(sh��)̫������?x��)�ʹ�]�h(hu��n)ϵ�y(t��ng)����(w��n)����
�μ��ı������ƺ��y���C�{(di��o)��(ji��)��ǡ����̎����ȫ�����`�
2���e�ֿ���
PID�������еķe����(y��ng)�ڈD1���`������ �c����(bi��o)�S��������e���D�еĻ�ɫ���֣���PID���Ƴ����������Ԉ�(zh��)�еģ���(zh��)�е����ڷQ��ɘ����ڡ�Ӌ(j��)��C(j��)�ij����ÈD1�и�������e֮�́����ƾ��_�ķe�֣��D�е�TS���Dzɘ����ڡ�
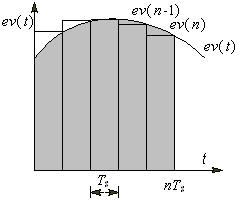
�D1 �e���\(y��n)��ʾ��D
ÿ��PID�\(y��n)��r(sh��)����ԭ���ķe��ֵ�Ļ��A(ch��)�ϣ�����һ���c��(d��ng)ǰ���`��ֵev��n�������ȵ�С���֡��`���ؓ(f��)ֵ�r(sh��)���e�ֵ�������ؓ(f��)��
�ք��{(di��o)��(ji��)�ضȕr(sh��)���e�ֿ����ஔ(d��ng)�ڸ���(j��)��(d��ng)�r(sh��)���`��ֵ�������Ե��{(di��o)�λ���ĽǶȣ�ÿ���{(di��o)��(ji��)�ĽǶ�����ֵ�c��(d��ng)�r(sh��)���`��ֵ�����ȡ��ضȵ����O(sh��)��ֵ�r(sh��)�`��������e���(xi��ng)����ʹ�ӟ������u����֮�e���(xi��ng)�pС�����ֻҪ�`����㣬��������ݔ���͕���?y��n)�e�����ö�����׃�����e���{(di��o)��(ji��)�ġ����������_�ģ��e���(xi��ng)�МpС�`������á�һֱҪ��ϵ�y(t��ng)̎�ڷ�(w��n)����B(t��i)���@�r(sh��)�`�����㣬�������ֺ��ֲ��־����㣬�e�ֲ��ֲŲ���׃�������҄��õ��ڷ�(w��n)�B(t��i)�r(sh��)��Ҫ�Ŀ�������ݔ��ֵ������(y��ng)�������ضȿ���ϵ�y(t��ng)���λ���D(zhu��n)�ǵ�λ��L����˷e�ֲ��ֵ�������������(w��n)�B(t��i)�`���߿��ƾ��ȣ��e������һ���DZ�횵ġ�
PID������ݔ���еķe�ֲ����c�`��ķe�ֳ����ȡ���?y��n)�e�֕r(sh��)�gTI�ڷe���(xi��ng)�ķ�ĸ�У�TIԽС���e���(xi��ng)׃�����ٶ�Խ�죬�e������Խ��(qi��ng)��
3��PI����
������ݔ���еķe���(xi��ng)�c��(d��ng)ǰ���`��ֵ���^ȥ�v���`��ֵ���ۼ�ֵ�����ȣ���˷e�����ñ������Ї�(y��n)�صĜ������ԣ���ϵ�y(t��ng)�ķ�(w��n)���Բ���������e���(xi��ng)��ϵ��(sh��)�O(sh��)�õò��ã���ؓ(f��)�����ú��yͨ�^�e�����ñ���Ѹ�ٵ��������������(xi��ng)�]�����t��ֻҪ�`��һ���F(xi��n)���������־͕����������á���˷e�����ú��نΪ�(d��)ʹ�ã���һ���c��������(li��n)��ʹ�ã��M��PI��PID��������
PI��PID�������ȿ˷��ˆμ��ı����{(di��o)��(ji��)�з�(w��n)�B(t��i)�`���ȱ�c(di��n)���ֱ����ˆμ��ķe���{(di��o)��(ji��)푑�(y��ng)�����ӑB(t��i)���ܲ��õ�ȱ�c(di��n)����˱��V��ʹ�á�
����������зe�����ã��������PI��PID���ƣ����e���������A�Sݔ��ķ�(w��n)�B(t��i)�`��@�r(sh��)���Ԍ�����ϵ��(sh��)�{(di��o)��СһЩ��
����e������̫��(qi��ng)�����e�֕r(sh��)�g̫С�����ஔ(d��ng)��ÿ���{(di��o)�λ���ĽǶ�ֵ�^�����۷e�����Õ�ʹϵ�y(t��ng)ݔ���ĄӑB(t��i)����׃����{(di��o)����������ʹϵ�y(t��ng)����(w��n)�����e������̫�������e�֕r(sh��)�g̫���t������(w��n)�B(t��i)�`����ٶ�̫�����e�֕r(sh��)�g��ֵ��(y��ng)ȡ���m�С�
4��������
�`����־����`���׃�����ʣ��`��׃��Խ�죬���ֽ^��ֵԽ���`������r(sh��)�����֞������`��pС�r(sh��)�����֞�ؓ(f��)��������ݔ�������ֲ����c�`����ֳ����ȣ���ӳ�˱�����׃����څ�ݡ�
�н�(j��ng)�(y��n)�IJ����ˆT�ڜض������^�죬������δ�_(d��)���O(sh��)��ֵ�r(sh��)������(j��)�ض�׃����څ�ݣ��A(y��)�е��ضȌ������^�O(sh��)��ֵ�����F(xi��n)���{(di��o)�������{(di��o)��(ji��)�λ�����D(zhu��n)�ǣ���ǰ�pС�ӟ��������@�ஔ(d��ng)��ʿ������h(yu��n)�����Ƅ�Ŀ��(bi��o)�r(sh��)�����]���ӏ��\(y��n)�ӵĕr(sh��)�g����Ҫһ������ǰ��һ�ӡ�
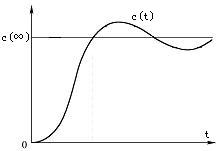
�D2 �A�S푑�(y��ng)����
�D2�е�c (��)�鱻����c (t)�ķ�(w��n)�B(t��i)ֵ����������ֵ���`��e(t) = c (��) - c (t)���ڈD2�І����^�̵������A�Σ���(d��ng) �r(sh��)����������δ���^�䷀(w��n)�B(t��i)ֵ��������?y��n)��`��e(t)�����pС���`����ֺͿ�����ݔ�����ֲ��֞�ؓ(f��)ֵ���pС�˿�������ݔ�������ஔ(d��ng)����ǰ�o�����Ƅ����ã�����K�����������������Կ��Ԝp�ٳ��{(di��o)��������ֿ��ƾ��г�ǰ���A(y��)�y�����ԣ��ڳ��{(di��o)��δ���F(xi��n)֮ǰ��������ǰ�o���������á�
�]�h(hu��n)����ϵ�y(t��ng)����ʎ��������(w��n)���ĸ���ԭ���������^��Ĝ������ء���?y��n)����?xi��ng)���A(y��)�y�`��׃����څ�ݣ��@�N����ǰ�������ÿ��Ե����������ص�Ӱ푡��m��(d��ng)?sh��)��ֿ������ÿ���ʹ���{(di��o)���pС������ϵ�y(t��ng)�ķ�(w��n)���ԡ�
�������^��Ĝ������Եı��،������PI���Ƶ�Ч�������룬���Կ��]�����ֿ��ƣ��Ը���ϵ�y(t��ng)���{(di��o)��(ji��)�^���еĄӑB(t��i)���ԡ�������֕r(sh��)�g�O(sh��)�Þ�0���ֲ����������á�
�֕r(sh��)�g�c�����õď�(qi��ng)�������ȣ��֕r(sh��)�gԽ��������Խ��(qi��ng)������֕r(sh��)�g̫�����`�����׃���r(sh��)��푑�(y��ng)�����Ͽ��ܕ����F(xi��n)��ë�̡���
�ֿ��Ƶ�ȱ�c(di��n)�nj��ɔ_�����У�ʹϵ�y(t��ng)���Ƹɔ_���������͡���˿����ֲ������ӑT�ԞV���h(hu��n)��(ji��)��
5���ɘ�����
PID���Ƴ����������Ԉ�(zh��)�еģ���(zh��)�е����ڷQ��ɘ����ڡ��ɘ�����ԽС���ɘ�ֵԽ�ܷ�ӳģ�M����׃����r������̫С������CPU���\(y��n)�㹤�����������ɴβɘӵIJ�ֵ���]��ʲô׃������ʹPID������ݔ�����ֲ��ֽӽ����㣬����Ҳ���ˌ��ɘ�����ȡ���^С��
��(y��ng)���C�ڱ�����Ѹ��׃���r(sh��)�����熢���^���е������A�Σ�����������IJɘ��c(di��n)��(sh��)��������?y��n)�ɘ��c(di��n)��(sh��)�^�ٶ��Gʧ���ɼ���ģ�M���е���Ҫ��Ϣ��
6��PID����(sh��)���{(di��o)������
������PID����������(sh��)�r(sh��)�����Ը���(j��)�������ą���(sh��)�cϵ�y(t��ng)�ӑB(t��i)���ܺͷ�(w��n)�B(t��i)����֮�g�Ķ����P(gu��n)ϵ���Ì�(sh��)�(y��n)�ķ������{(di��o)��(ji��)�������ą���(sh��)���н�(j��ng)�(y��n)���{(di��o)ԇ�ˆTһ������^��صõ��^��M����{(di��o)ԇ�Y(ji��)�������{(di��o)ԇ������Ҫ�Ć��}����ϵ�y(t��ng)���ܲ������˝M��r(sh��)��֪����(y��ng)ԓ�{(di��o)��(ji��)��һ������(sh��)��ԓ����(sh��)��(y��ng)ԓ����߀�ǜpС��
���˜p����Ҫ�����ą���(sh��)�����ȿ��Բ���PI�����������˱��Cϵ�y(t��ng)�İ�ȫ�����{(di��o)ԇ�_ʼ�r(sh��)��(y��ng)�O(sh��)�ñ��^���صą���(sh��)���������ϵ��(sh��)��Ҫ̫�e�֕r(sh��)�g��Ҫ̫С���Ա�����F(xi��n)ϵ�y(t��ng)����(w��n)�����{(di��o)���^��Į�����r���o��һ���A�S�o����̖������(j��)��������ݔ�����ο��ԫ@��ϵ�y(t��ng)���ܵ���Ϣ�����糬�{(di��o)�����{(di��o)��(ji��)�r(sh��)�g����(y��ng)����(j��)PID����(sh��)�cϵ�y(t��ng)���ܵ��P(gu��n)ϵ������(f��)�{(di��o)��(ji��)PID�ą���(sh��)��
����A�S푑�(y��ng)�ij��{(di��o)��̫��(j��ng)�^�����ʎ���ܷ�(w��n)�����߸�������(w��n)������(y��ng)�pС����ϵ��(sh��)������e�֕r(sh��)�g������A�S푑�(y��ng)�]�г��{(di��o)�������DZ����������^�ھ������^���^�̕r(sh��)�g̫�L����(y��ng)���෴�ķ����{(di��o)������(sh��)��
��������`����ٶ��^���������m��(d��ng)�pС�e�֕r(sh��)�g������(qi��ng)�e�����á�
����(f��)�{(di��o)��(ji��)����ϵ��(sh��)�ͷe�֕r(sh��)�g��������{(di��o)����Ȼ�^���Լ����ֿ��ƣ��֕r(sh��)�g��0��u������(f��)�{(di��o)��(ji��)�������ı������e�ֺ��ֲ��ֵą���(sh��)��
��֮��PID����(sh��)���{(di��o)ԇ��һ���C�ϵġ�������(sh��)����Ӱ푵��^�̣���(sh��)�H�{(di��o)ԇ�^���еĶ�·Lԇ�Ƿdz���Ҫ�ģ�Ҳ�DZ�횵ġ�
�����dȤ������
- ��՜y���ĸ���
- ���ϵ�y(t��ng)�ĽM��
- ��ՠt/��ոG�����������x
- �o��ӛ䛃x
- �t��PID����ԭ��
- FP93-���IJ����f����
- AI-518/518P���˹����ܜضȿ�����ʹ���f����(V8.1)
- �B�T��늜ؿر�


- FP93-���IJ����f����
- AI-518/518P���˹����ܜضȿ�����ʹ���f����(V8.1)
- ���ϵ�y(t��ng)�ĽM��
- �t��PID����ԭ��
- ��ՠt/��ոG�����������x
- �o��ӛ䛃x
- ��՜y���ĸ���
- �B�T��늜ؿر�

- ���ż�ķ����̖Ҏ(gu��)��
- FP93-���IJ����f����
- ��������ʽ�t���R���t���������أ�
- AMS 2750E�� �� �y �� ����һ��
- �͜ع����մɣ�LTCC�����ß��Y(ji��)��֠t
- ���У���R���t�Č�(sh��)�H�ض�
- �W(w��ng)���t��t������ע�����(xi��ng)
- �ߜع����մ�HTCC
- ���ż�ķ����̖Ҏ(gu��)��
- FP93-���IJ����f����
- AMS 2750E�� �� �y �� ����һ��
- ��̼���ϻ���ԭ����������M(j��n)�k��
- AMS 2750E�� �� �y �� ��������
- AMS 2750E�� �� �y �� ��������
- AMS 2750E�� �� �y �� ��������
- �����ͻ�u���ܼ���;
���������߿Ƽ��ɹ����� ʯīϩ�ٴ��ϰ�")

 |
|||||
 |
 |
 |
 |
 |
 |